

How To Repair Terminal Solder Connection On Motor
Arduino Simple Field Oriented Control (FOC) library
![]()
Nosotros alive in very exciting times
Therefore this is an attempt to:
-
🎯 Demystify FOC algorithm and make a robust simply simple Arduino library: Arduino SimpleFOClibrary- Support as many motor + sensor + commuter + mcu combinations out there
-
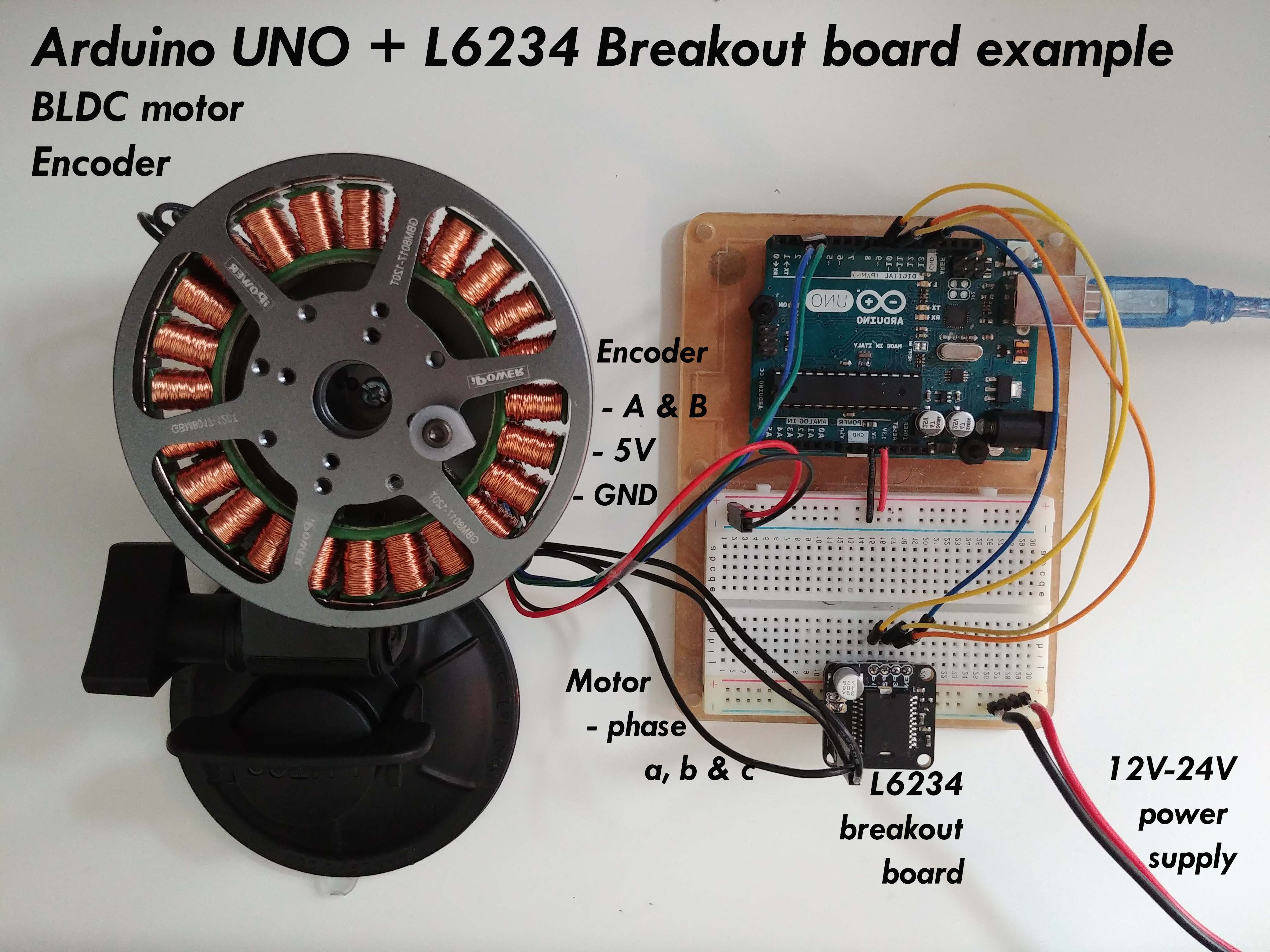
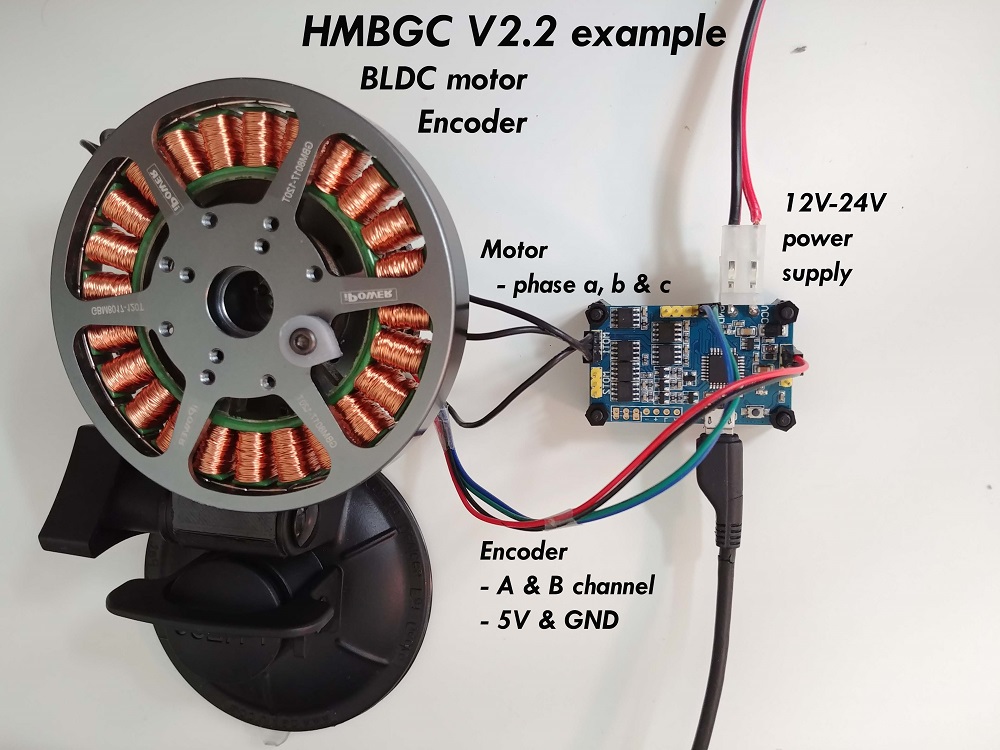
🎯 Develop a modular FOC supporting BLDC driver boards:- Low-power gimbal driver (<5Amps) : Arduino SimpleFOCShield.
- NEW
📢 : Medium-power BLDC driver (<30Amps): Arduino SimpleFOCPowerShield . - Run into also @byDagor's fully-integrated ESP32 based board: Dagor Brushless Controller
NEW RELEASE
📢 : SimpleFOClibrary v2.2 - run across release
- Sensor floating point mistake bugfix (initial solution) simplefoc#83, simplefoc#37
- Sensor class restructuring - slight API change - docs
- Restructured the generic code and simplified adding new mcus: Important: an additional compiler flag needed for PlatformIO see consequence and PlatformIO docs
- Removed initial spring simplefoc#110, simplefoc#111
- Double to bladder transformation of the lawmaking - operation increase past @sDessens (simplefoc#100), @KaSroka (simplefoc#100)
- Docs webiste translated to Chinese!
🎉 : Awesome work😃 past @MINQING1101, @Deng-ge-open-source and @mingggggggg- New MCU support - docs
- Support for arduino leonardo simplefoc#108
- Initial back up for portenta h7 lath in collaboration with
Arduino
- Initial support for esp8266
- Depression side electric current sensing initial support - docs
- Initial support for stm32 B_G431B_ESC1 by @sDessens: PR simplefoc#73
- Initial support for samd21 by @maxlem: PR simplefoc#79
- Initial support for esp32 by @byDagor
Arduino SimpleFOClibrary v2.i

This video demonstrates the ElementaryFOClibrary bones usage, electronic connections and shows its capabilities.
Features
- Arduino compatible:
- Arduino library code
- Arduino Library Manager integration
- Open up-Source: Full code and documentation available on github
- Easy to setup and configure:
- Piece of cake hardware configuration
- Easy tuning the command loops
- Modular:
- Supports as many sensors, BLDC motors and driver boards as possible
- Supports multiple MCU architectures:
- Arduino: UNO, MEGA, any lath with ATMega328 chips
- STM32 boards: Nucleo, Bluepill ...
- ESP32
- Teensy boards
- Plug & play: Arduino SimpleFOCShield
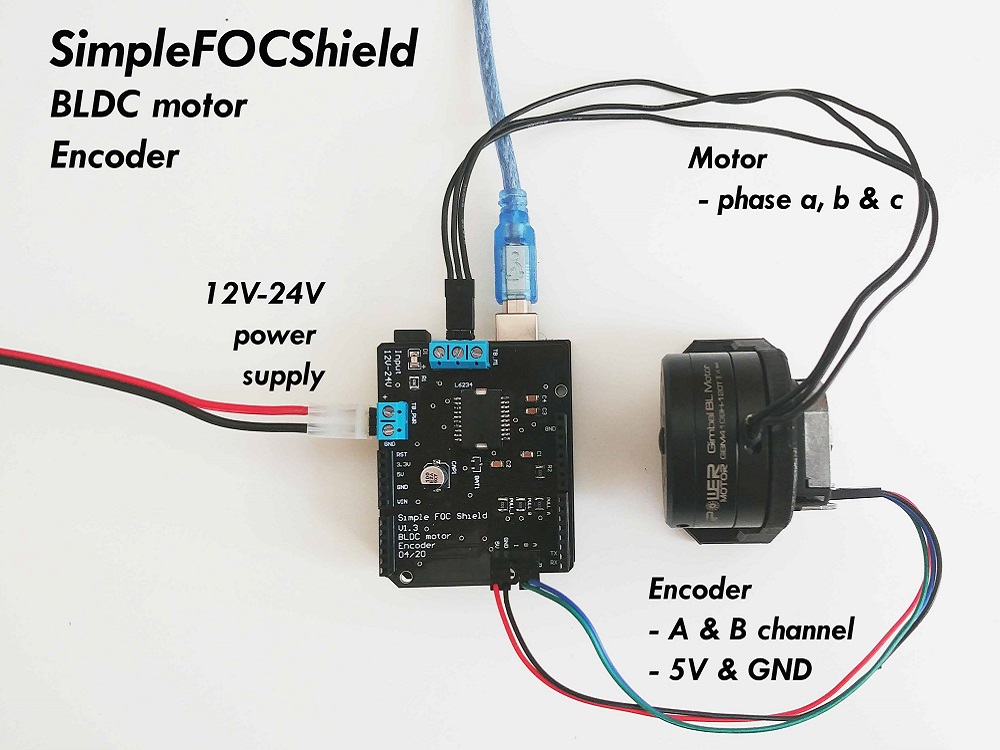
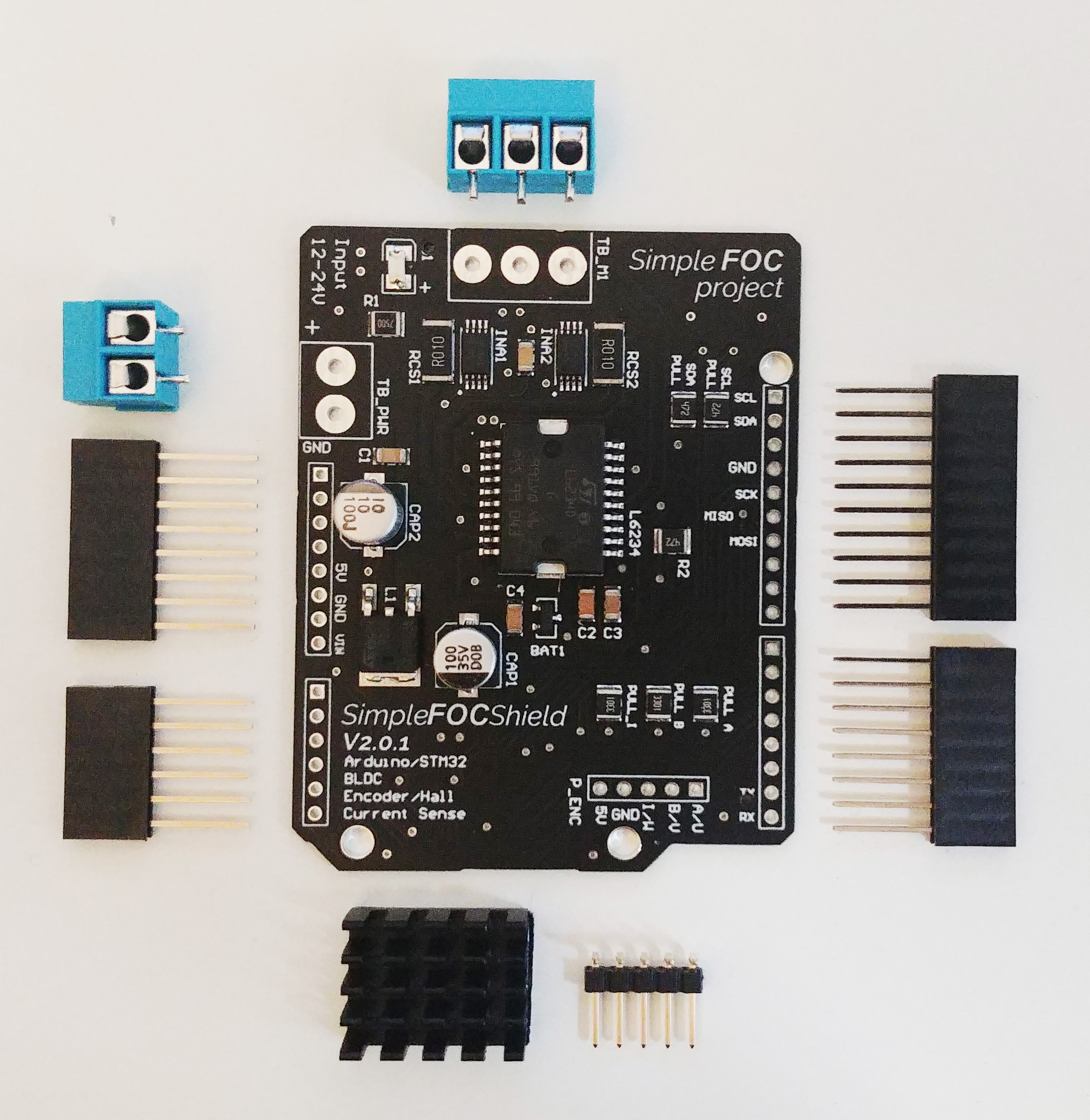
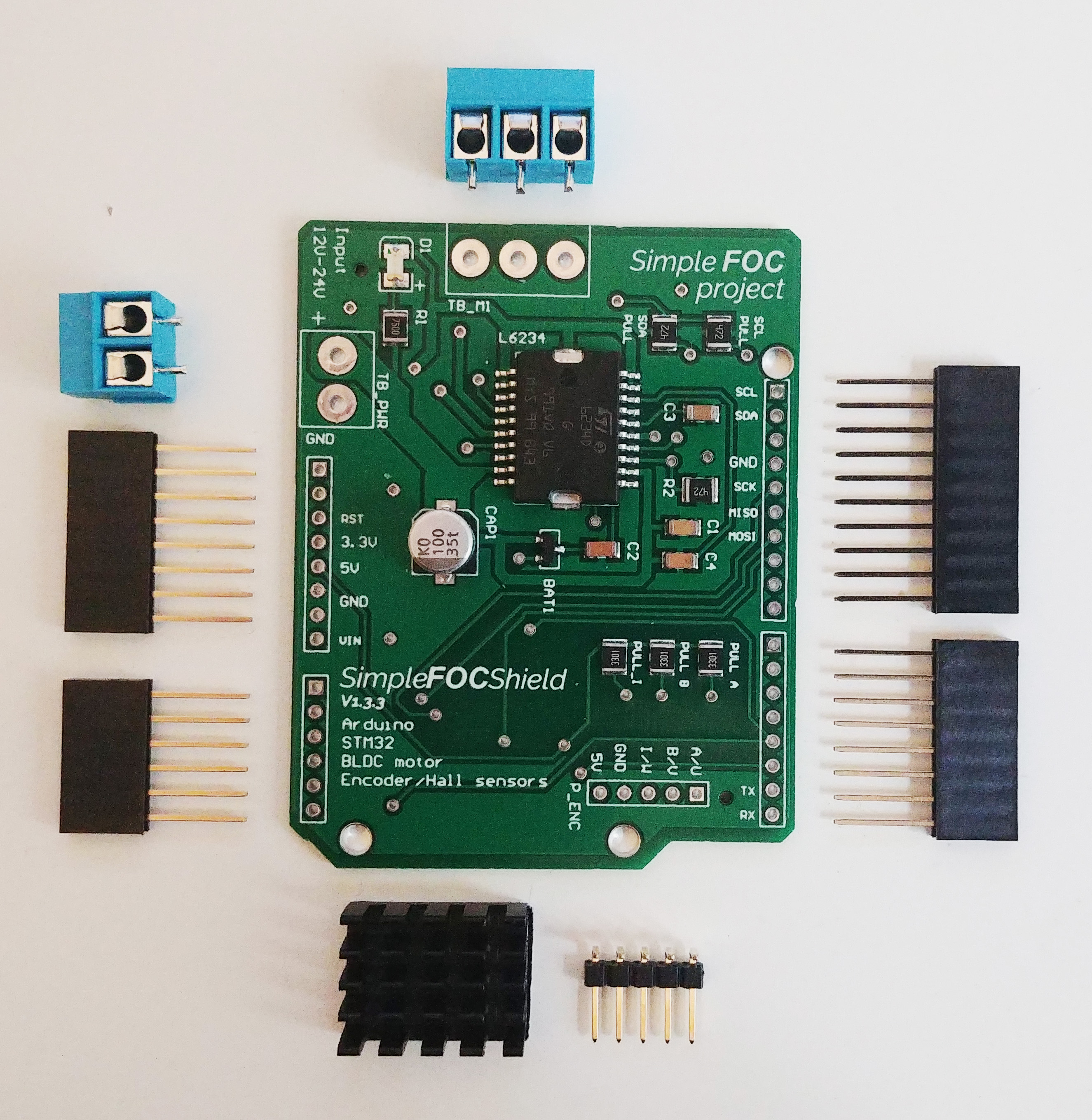
Arduino SimpleFOCShield v2.0.3
Features
- Plug & play: In combination with Arduino SimpleFOClibrary - github
- Depression-cost: Price of €15 - Bank check the pricing
- In-line current sensing: Up to 3Amps/5Amps bidirectional
- configurable: 3.3Amps - three.3V adc, 5Amps - 5V adc
- Integrated 8V regulator:
- Enable/disable by soldering pads
- Max ability 120W - max current 5A, power-supply 12-24V
- Designed for Gimbal motors with the internal resistance >ten Ωs.
- Stackable: running 2 motors in the aforementioned time
- Encoder/Hall sensors interface: Integrated iii.3kΩ pullups (configurable)
- I2C interface: Integrated 4.7kΩ pullups (configurable)
- Configurable pinout: Hardware configuration - soldering connections
- Arduino headers: Arduino UNO, Arduino MEGA, STM32 Nucleo boards...
- Open Source: Fully available fabrication files - how to make it yourself
Getting Started
Depending on if yous want to apply this library as the plug and play Arduino library or you want to get insight in the algorithm and make changes there are two ways to install this code.
- Full library installation Docs
- Minimal project architect Docs
Arduino SimpleFOClibrary installation to Arduino IDE
Arduino Library Manager
The simplest way to get concur of the library is directly past using Arduino IDE and its integrated Library Manager.
- Open up Arduino IDE and commencement Arduino Library Manager past clicking:
Tools > Manage Libraries.... - Search for
Unproblematic FOClibrary and install the latest version. - Reopen Arduino IDE and you should have the library examples in
File > Examples > Simple FOC.
Using Github website
- Go to the github repository
- Click get-go on
Clone or Download > Download ZIP. - Unzip it and place it in
Arduino Librariesfolder. Windows:Documents > Arduino > libraries. - Reopen Arduino IDE and you should have the library examples in
File > Examples > Uncomplicated FOC.
Using terminal
- Open terminal and run
cd #Arduino libraries folder git clone https://github.com/simplefoc/Arduino-FOC.git - Reopen Arduino IDE and y'all should have the library examples in
File > Examples > Unproblematic FOC.
SimpleFOClibrary minimal project architect
For those willing to experiment and to change the code I suggest using the minimal project architect minimal branch.
This code is completely independent and you tin run information technology every bit any other Arduino Sketch without the demand for any libraries.
All you need to do is:
- Go to minimal branch
- Follow the tutorial in the README file and choose just the library files that are necessary for your application.
Arduino code case
This is a unproblematic Arduino code instance implementing the velocity control program of a BLDC motor with encoder.
NOTE: This plan uses all the default command parameters.
#include <SimpleFOC.h> // BLDCMotor( pole_pairs ) BLDCMotor motor = BLDCMotor(11); // BLDCDriver( pin_pwmA, pin_pwmB, pin_pwmC, enable (optional) ) BLDCDriver3PWM commuter = BLDCDriver3PWM(9, 10, 11, eight); // Encoder(pin_A, pin_B, CPR) Encoder encoder = Encoder(2, three, 2048); // channel A and B callbacks void doA(){encoder.handleA();} void doB(){encoder.handleB();} void setup() { // initialize encoder hardware encoder.init(); // hardware interrupt enable encoder.enableInterrupts(doA, doB); // link the motor to the sensor motor.linkSensor(&encoder); // power supply voltage [5] driver.voltage_power_supply = 12; // initialise driver hardware commuter.init(); // link driver motor.linkDriver(&driver); // gear up control loop type to be used motor.controller = MotionControlType::velocity; // initialize motor motor.init(); // align encoder and start FOC motor.initFOC(); } void loop() { // FOC algorithm part motor.loopFOC(); // velocity control loop function // setting the target velocity or 2rad/s motor.move(two); } You can discover more details in the SimpleFOC documentation.
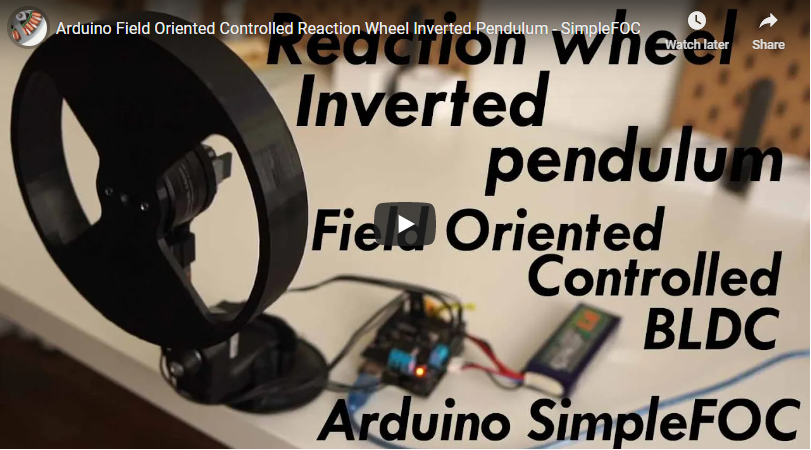
Example projects
Hither are some of the SimpleFOClibrary and SimpleFOCShield application examples.


Documentation
Find out more information about the Arduino SimpleFOC project in docs website
Arduino FOC repo construction
| Branch | Clarification | Status |
|---|---|---|
| main | Stable and tested library version | |
| dev | Development library version | |
| minimal | Minimal Arduino example with integrated library | |

Source: https://githubhelp.com/1126259445/Arduino-FOC
Posted by: searsgloopenise87.blogspot.com
0 Response to "How To Repair Terminal Solder Connection On Motor"
Post a Comment